Glaucio Paulino,Georgia Institute of Technology
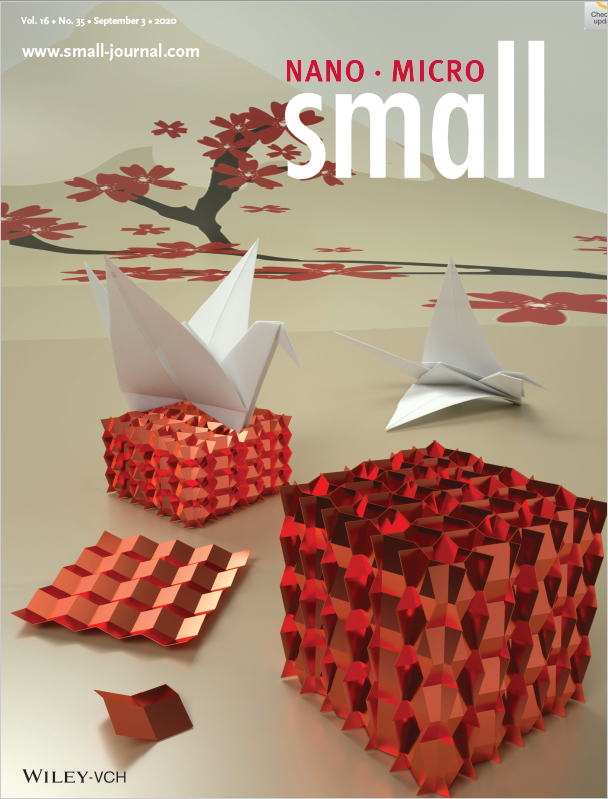
We study the geometric mechanics of origami assemblages and investigate how geometry affects behavior and properties. Understanding origami from a structural standpoint can allow for conceptualizing and designing feasible applications across scales and disciplines of engineering. We review the basic mathematical rules of origami and use 3D-printed origami legos to illustrate those concepts. We then present a reduced-order-model, which consists of an improved bar-and-hinge model, to simulate origami assemblages. We explore the stiffness of tubular origami and kirigami structures based on the Miura-ori folding pattern. A unique orientation for zipper coupling of rigidly foldable origami tubes substantially increases stiffness in higher order modes and permits only one flexible motion through which the structure can deploy. We couple compatible origami tubes into a variety of cellular assemblages that enhances mechanical characteristics and geometric versatility, leading to the design of structures and configurational metamaterials that can be deployed, stiffened, and tuned. We have designed, fabricated (using direct laser writing), and tested (SEM) this metamaterial at the micron-scale. This resulted not only in the smallest scale origami assembly, but also in a metamaterial with intriguing mechanical properties, such as anisotropy, reversible auxeticity, and large degree of shape recoverability. The presentation concludes with a vision toward the field of origami engineering, including origami robots with distributed actuation, allowing for on-the-fly programmability, and other interdisciplinary applications.